
Exploring the FTC 2024 Season: Into the Deep
The 2024 First Tech Challenge (FTC) season has officially kicked off, bringing with it a thrilling new game titled Into the Deep, presented by RTX. Teams across the globe, including our school’s very own FTC robotics teams 9001 and 9000 Rangers, are diving into this exciting challenge that combines engineering ingenuity with strategic gameplay. This year’s competition promises not only to test the limits of robot design but also teamwork and adaptability on the field.
The Game: Into the Deep
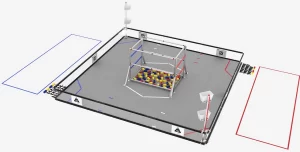
Into the Deep is played on a 12-foot square field with foam tile flooring and one foot high walls. At the center lies a submersible structure, the focal point of the game. This structure features several key scoring areas, including low and high rungs, low and high chambers, and low and high baskets. The field is divided into Alliance specific zones (red and blue) as well as neutral zones, creating dynamic opportunities for teams to score points and compete.
Each match involves four randomly selected teams, split into two alliances. Every alliance consists of two teams and is supported by a human player. Intriguingly, your competitor in one match might become your ally in the next, adding an element of unpredictability to the competition. Matches consist of distinct phases that test both robot design and human strategy, creating a multi-layered competitive experience.
Team Composition and Robot Design
Each team consists of up to two driver-operators, a coach, a human player, and a robot. Robots must adhere to strict design specifications outlined in the competition manual. They start the match within an 18-inch sizing cube but may expand once the match begins. However, they cannot horizontally exceed a 20 x 42 inch rectangle, ensuring that designs prioritize both efficiency and compliance.
Building a competitive robot for Into the Deep involves creativity and precision. Teams must carefully select materials and components that meet competition guidelines while enabling their robot to perform a variety of tasks, such as navigating the field, manipulating scoring elements, and interacting with game structures. This requires a blend of mechanical engineering, programming expertise, and strategic foresight.
Scoring Elements and Game Mechanics
The primary scoring elements in Into the Deep are plastic samples, which are rectangular blocks measuring 2 inches by 2 inches by 3.5 inches. The game features 80 samples in total: 20 red Alliance samples, 20 blue Alliance samples, and 40 neutral samples. Additionally, teams can use Clips provided on the field to convert samples into specimens, which are vital for earning higher scores. Each Alliance has 20 Clips available for use.
Before each match, samples and Clips are strategically arranged. For example:
- Six samples are randomly placed in the submersible zone.
- 20 Clips are positioned outside each observation zone.
- 12 samples are placed in preset sample zones.
Understanding the placement of scoring elements is crucial for developing an effective game plan. Teams must analyze the field layout and decide on optimal paths for their robots to collect samples, deliver them to human players, and score in high-value areas. Teams also have to consider how best to utilize their human players to attach Clips efficiently, as the conversion of samples to specimens often proves pivotal in securing higher scores.
Match Phases and Scoring Opportunities
Matches are divided into three distinct phases: the autonomous period, the teleoperated period, and the endgame.
Autonomous Period (30 Seconds)
During the autonomous period, robots operate solely on preprogrammed instructions and sensor inputs. Teams can earn points by:
- Scoring samples in the net zone (2 points each).
- Scoring samples in the low basket (4 points each).
- Scoring samples in the high basket (8 points each).
This phase highlights the importance of coding and sensor integration. Teams that excel in autonomous programming can gain a significant advantage early in the match, setting the stage for a strong overall performance. Successful navigation and precise execution of tasks during this phase demonstrate a team’s technical mastery and ability to anticipate the dynamics of the game.
Teleoperated Period (2 Minutes)
Following the autonomous phase, driver-operated controls take over. Teams have numerous ways to score, such as:
- Delivering Alliance-specific samples to the observation zone for human players to convert into specimens by attaching Clips.
- Scoring specimens in the low chamber (6 points each) or high chamber (10 points each).
- Scoring samples in the net zone, low basket, or high basket, with points varying based on placement.
The teleoperated period demands seamless coordination between drivers, human players, and the robot itself. Teams must balance offensive strategies, such as scoring and specimen conversion, with defensive maneuvers to block opponents and protect their scoring opportunities. Teams must also adapt quickly to changing conditions on the field, such as opponents interfering with access to key scoring areas or the movement of samples and Clips.
Endgame (Final 30 Seconds)
The final phase of the match introduces unique scoring opportunities and restrictions:
- Robots have protected access to their Alliance’s ascent zones.
- Contacting the low rung earns 3 points.
- Achieving a low level ascent earns 15 points.
- Achieving a high level ascent earns 30 points.
- Parking the robot in the observation zone earns 3 points.
The endgame often proves decisive, as successful climbs and last-minute scores can dramatically alter the outcome of a match. Teams must carefully time their ascent attempts to avoid interference while maximizing their point potential. This phase underscores the importance of strategic planning and effective communication within the Alliance.
Strategic Gameplay
Success in Into the Deep hinges on strategic planning, precision engineering, and effective teamwork. Teams must carefully decide when to focus on gathering samples, converting them into specimens, and scoring in high-value areas. The versatility of robots, coupled with the adaptability of drivers and human players, can significantly impact a team’s performance.
Moreover, alliances must develop strategies that complement the strengths of their partner teams. Communication and adaptability are key, as no two matches are alike. The ability to quickly assess the field and respond to evolving scenarios often separates the top teams from the rest. For example, teams must decide whether to prioritize specimen conversion for higher scores or focus on climbing to secure valuable endgame points.
Challenges and Opportunities
Into the Deep presents unique challenges that push teams to innovate. Navigating the field’s taped-off zones, managing the dimensions of an expanding robot, and ensuring precision in specimen creation are just a few of the obstacles teams must overcome. However, these challenges also present opportunities for creative problem solving and skill development.
Teams have access to advanced technologies, such as AprilTags for navigation, which can enhance robot accuracy and efficiency. Leveraging these tools effectively can provide a competitive edge and showcase the team’s technical prowess. Additionally, the diversity of scoring options allows teams to tailor their strategies to their robot’s capabilities, emphasizing the importance of versatility and adaptability.
The Role of Human Players
Human players play a vital role in Into the Deep. They are responsible for attaching Clips to samples to create specimens, which are essential for higher-scoring opportunities. Their efficiency and accuracy in this task can significantly influence the outcome of a match. Effective communication between human players and drivers is crucial, as it ensures that specimens are ready for scoring at the right time and in the right locations.
Human players must also remain vigilant about field rules, such as avoiding interference with robots or other players. Their ability to adapt to the fast paced dynamics of the game is a testament to the collaborative spirit that FTC promotes.
The Spirit of FTC
Beyond the competitive aspect, the First Tech Challenge emphasizes the importance of gracious professionalism. Teams are encouraged to collaborate, learn from one another, and uphold the values of respect and integrity, ensuring a positive experience for all participants. This ethos fosters a sense of community within the competition, where teams celebrate each other’s achievements and work together to advance the field of robotics.
Our School’s Journey
Our school’s FTC team has embraced the challenge of Into the Deep with enthusiasm and determination. From brainstorming innovative robot designs to fine-tuning autonomous programming, the team is hard at work preparing for upcoming matches. Their efforts reflect not only their technical skills but also their commitment to teamwork and sportsmanship.
This season, the team aims to build on past successes and reach new heights. Through countless hours of design, testing, and collaboration, they are developing a robot that embodies the principles of efficiency, adaptability, and ingenuity. Let’s take a look at Jesuit’s FTC team 9001 Rangers.
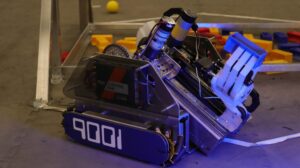
9001 Rangers
Our school’s FTC team, the 9001 Rangers, has poured countless hours into the design, construction, and refinement of their robot for this season’s Into the Deep challenge. The robot showcases a blend of innovative design choices, precise engineering, and practical functionality, all developed through a meticulous design process.
The team’s design process begins with brainstorming and sketching ideas to visualize potential mechanisms. This helps the team communicate their ideas effectively and refine their designs collaboratively. They then move to Computer-Aided Design (CAD), utilizing Onshape software for its ease of sharing and editing files. Once the design is finalized, parts are either fabricated using tools like the Bambu Lab X-1 Carbon 3D Printer and CNC Router or ordered from reliable vendors like GoBilda. Assembly and testing follow, during which the team identifies and resolves issues through iterative refinement, ensuring each mechanism functions seamlessly.
Subsystems Overview
Claw:
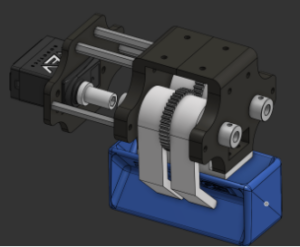
The claw mechanism was one of the first subsystems developed. After evaluating various intake mechanisms, the team opted for a claw-based design actuated by a servo motor. This choice offered a balance of precision and reliability, allowing the robot to firmly grip and manipulate game elements. The claw features a lightweight, finger-like structure optimized for the specific dimensions of the game’s samples, ensuring consistent performance during matches. The iterative prototyping process for the claw also highlighted the importance of material selection, leading to the integration of lightweight yet durable materials that can endure the rigors of competitive play.
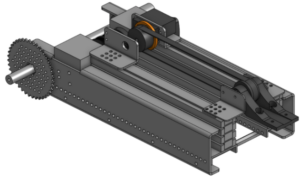
Climber:
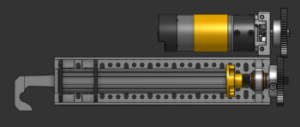
The climber subsystem underwent significant evolution. Initial designs faced challenges with space constraints and stability, leading to a redesign incorporating linear actuators, magnets, and a winch system. This innovative approach allows the robot to achieve elevation during the endgame, despite early setbacks with defective gearboxes and balance issues. To ensure reliability, the team carefully calibrated the tension of strings used in the climber and reinforced critical components to prevent mechanical failures during matches.
Drivebase:
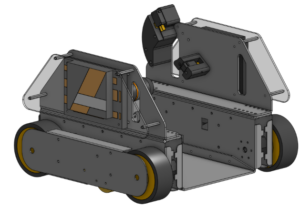
The drivebase forms the foundation of the robot, featuring a lightweight yet rigid sheet metal frame reinforced with flanges for added strength. Mecanum wheels provide omni-directional movement, enhancing the robot’s agility on the field. The inclusion of odometry pods ensures precise navigation, a critical advantage during the autonomous period. Beyond functionality, the drivebase also incorporates design elements for ease of maintenance, such as a modular battery compartment and robust cable management solutions that minimize downtime between matches.
Arm:

The arm subsystem is the most complex moving component, designed to position the claw effectively. It utilizes GoBilda Viper Slide Kits for extension and a pivot mechanism driven by a motor and sprockets. The arm’s design incorporates extensive torque multiplication to handle heavy loads, while limit switches and hardstops ensure safe and accurate operation. The wrist mechanism, mounted at the arm’s end, adds further versatility by allowing precise control of the claw’s orientation. This multi-axis capability enables the robot to execute intricate maneuvers, such as retrieving samples from difficult angles or placing specimens into high-scoring zones.
Coding and Controls
The robot’s code is organized into subsystems and commands, streamlining both teleoperation and autonomous functionality. Subsystems manage individual components like the claw, arm, and drivebase, while commands execute specific tasks. During teleoperation, drivers benefit from automated setpoints for common actions, simplifying control and reducing the cognitive load during matches. The autonomous system leverages a command scheduler to execute pre-programmed routines, enabling the robot to perform complex tasks with precision and efficiency. The code’s modularity also allows the team to quickly adapt to changes in strategy or game requirements.
Challenges and Innovations
Throughout the development process, the 9001 Rangers encountered numerous challenges, from mechanical failures to programming bugs. However, each setback was met with determination and creativity. In addition to addressing technical hurdles, the team focused on enhancing the robot’s versatility. This included incorporating features like adjustable claw settings for handling different game elements and a modular arm design that can be reconfigured to adapt to evolving strategies.
Looking Ahead
As the season progresses, the 9001 Rangers are refining their robot to maximize its performance in every phase of the game. Their dedication to innovation, teamwork, and gracious professionalism sets them apart, and they are poised to make a significant impact in the competition. Reflecting on their journey, team member Will Garrison shared, “I’m proud of how much we’ve all worked for this and I’m glad we’ll be moving on to another competition.” We can’t wait to see what they accomplish in the thrilling journey ahead!