
Photography by The Last Roundup staff
While most Jesuit students were relishing their last two days of Spring Break, the Jesuit Robotics Team on March 14-15 qualified for the national tournament by winning fourth place in the National Robotics Challenge regional tournament in Dallas. The Jesuit All Sparks’ robot dominated the field, except for an elite few opponents, and accomplished more in the first 15 seconds than many robots accomplished in entire games.
The Rangers’ team 2848, also known as The Jesuit All Sparks, stood out at its first and difficult regional against teams that have already been to other competitions.
 Each competing team makes a robot that competes in the FRC’s game of the year, which changes each year. This year, alliances, groups of three teams that team up to compete against another alliance, made robots that were able to either push or launch large playing balls into goals. These balls appear similar to exercise balls in size and weight. They could accomplish this task either by pushing the balls into a low goal or by shooting the balls into a large goal. In order to score, teams either had to get a ball into one of the goals or pass the ball over the large bar located at half court. Because of this system, certain playing styles such as passing to a partner who then shoots the ball would be more effective than simply having everyone try to shoot on their own.
Each competing team makes a robot that competes in the FRC’s game of the year, which changes each year. This year, alliances, groups of three teams that team up to compete against another alliance, made robots that were able to either push or launch large playing balls into goals. These balls appear similar to exercise balls in size and weight. They could accomplish this task either by pushing the balls into a low goal or by shooting the balls into a large goal. In order to score, teams either had to get a ball into one of the goals or pass the ball over the large bar located at half court. Because of this system, certain playing styles such as passing to a partner who then shoots the ball would be more effective than simply having everyone try to shoot on their own.
The game is set up in a way where each team coordinates with three other teams in a 3v3. The teams are constantly shuffled to assure that each team gets an equal share of the “good” teammates. This is because some robots, like the Jesuit team’s, are very well designed while others are “bricks”, robots that either can’t play the objective or don’t work. After these first few rounds, each team is given a rank on the leader board. This rank determines the pick order and how alliances, the teams consisting of three teams, are formed. Alliances don’t change for the rest of the tournament. So, although the team was ranked fourth on the leader board, the Jesuit alliance made it all the way to the final round.
Currently, the team is working on their practice bot, which is designed almost identically to the one they use competitively. They make changes to that one before implementing the working ideas onto the competition robot. The robot they used worked very well, but there were a couple slight flaws. The ball fell out of their cradle a couple of times, and they ran into other robots on one or two occasions. Additionally, they hope to improve the drive train on the robot. The team did not really do anything wrong, but there are a few things that could just be done better. Vice President of the team, Jerray Dewa ’14, estimates that “we made 80 percent of the shots that we took.” Although this is a fantastic percentage, and the team’s stats are great overall, there is always room for improvement. Looking forward, Eric Dunkerly ’14, head programmer and human player of the team, mentioned that if they can just fix their problem with the cradle, “we will be one of the best teams.”
Dewa was very satisfied with the results, commenting that “we did a lot better than we have in the last couple years. On the playing field, he said that our only real problem was that “we didn’t take enough shots.” However, the team has been constantly improving both their own skills as players and the specs of their robot so that there shouldn’t be a problem come Houston, their next tournament.
The robot had two drivers who used xbox controllers to drive and shoot. Kieran Celli ’15 operated the robot’s launching mechanism while the president of the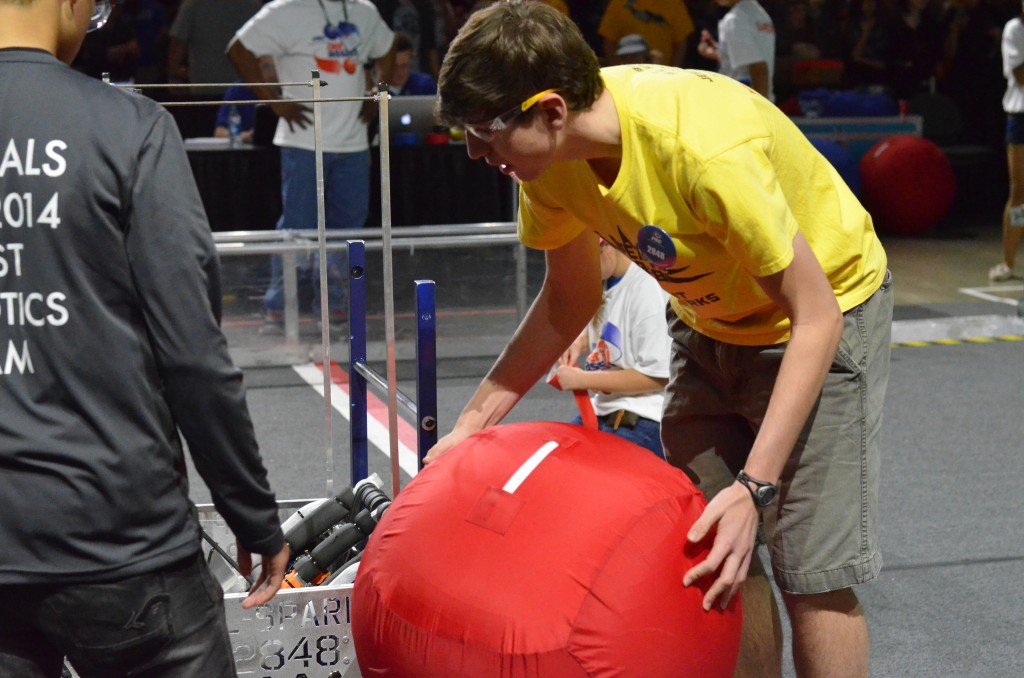 team, Kyle Wolf ’14, directed the robot’s drive train. Wolf would drive so that Celli could pick the ball up, and then Wolf would position the robot 5-20 feet away from the goal so that the ball would go in when it was launched. The launching mechanism is essentially that of a catapult so the ball will arc, and this arc means that the robot should optimally be between five and twenty feet from the robot. Celli stated that their main problem was that “there wasn’t enough [shooting].” In order to remedy this issue, the team has practiced more on the practice bot, increasing their coordination which will allow them to reload quicker and take more shots.
team, Kyle Wolf ’14, directed the robot’s drive train. Wolf would drive so that Celli could pick the ball up, and then Wolf would position the robot 5-20 feet away from the goal so that the ball would go in when it was launched. The launching mechanism is essentially that of a catapult so the ball will arc, and this arc means that the robot should optimally be between five and twenty feet from the robot. Celli stated that their main problem was that “there wasn’t enough [shooting].” In order to remedy this issue, the team has practiced more on the practice bot, increasing their coordination which will allow them to reload quicker and take more shots.
Zach Bennett ’15, member of the scouting team, was responsible for investigating the other teams robots. This job helps the the team pick alliance partners and determine other teams’ strengths and weaknesses. Bennett had this to say about his experience on the scout team, “it went really well. We used a program made by Grant Uy , to scout the other team’s robots. We watched the games and counted how many shots they scored and how many assists they had. So we were able to pick a good alliance member.”
Each team is allowed one human player. This year, the robotics team chose head programmer Eric Dunkerly ’14. As the human player, he was responsible for catching the ball and getting it to the robot. Coupled with his job as head programmer, he was very busy. “I have to make a lot of on the fly change, especially with a switch from the practice bot to the competition bot. Also, [as the human player], the teams caught on to all of our hand signals towards the end. So we used predominantly fake signals towards the end,” Dunkerly said. Celli mentioned, “[Dunkerly] was doing crazy hand signals even when we didn’t have the ball. I didn’t know what he was doing. It was awesome.”
During the autonomous period, the short period of time where the drivers were not allowed to touch the controls and the robot had to rely on its programming, the robot could consistently score twice. Dunkerly mentioned that “we had the best two ball autonon” and that Jesuit made “at least 90 percent” of the shots they went for.
The next tournament is in Houston on the weekend of April 5th, and the team is eager and excited to go. Wish them luck as they prepare for the upcoming tournament!